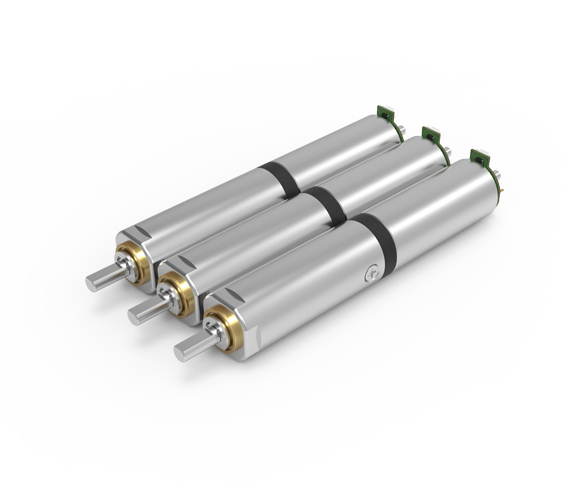


















步進(jìn)電機(jī)如何選配減速機(jī)?
步進(jìn)電機(jī)搭配減速機(jī)一體機(jī)稱(chēng)為步進(jìn)減速電機(jī),是一種應(yīng)用廣泛的減速傳動(dòng)設(shè)備,在步進(jìn)電機(jī)選配減速機(jī)需要注意如下事項(xiàng),選型方法、選型注意事項(xiàng)、選型誤區(qū)。
選型方法:
1.確認(rèn)負(fù)載額定扭矩要小于減速機(jī)額定輸出扭矩。
2.伺服電機(jī)額定扭矩減速比要大于負(fù)載額定扭矩。
3.負(fù)載通過(guò)減速機(jī)轉(zhuǎn)化到伺服電機(jī)的轉(zhuǎn)動(dòng)慣量,要在伺服電機(jī)允許的范圍內(nèi)。
4.確認(rèn)減速機(jī)精度能夠滿(mǎn)足您的控制要求。
5.減速機(jī)結(jié)構(gòu)形式,外型尺寸既能滿(mǎn)足設(shè)備要求,同時(shí)能與所選用的伺服電機(jī)連接。
選型注意事項(xiàng):
1.一般應(yīng)選用力矩比實(shí)際需要大百分之五十到百分之百的步進(jìn)電機(jī),因?yàn)椴竭M(jìn)電機(jī)不能過(guò)負(fù)載運(yùn)行,即便是瞬間過(guò)載都可能造成失步、停轉(zhuǎn)或不規(guī)則原地來(lái)回作動(dòng)。
2.上位控制器輸入的脈沖電流必須夠大(一般要》10mA),以確保光電耦合器穩(wěn)定導(dǎo)通,否則會(huì)導(dǎo)致步進(jìn)電機(jī)失步;如果輸入脈沖頻率過(guò)高,會(huì)因個(gè)別脈沖接收不到,導(dǎo)致步進(jìn)電機(jī)失步。
3.啟動(dòng)頻率不應(yīng)太高,應(yīng)在啟動(dòng)程序中設(shè)置加速過(guò)程,即從規(guī)定的啟動(dòng)頻率開(kāi)始,加速到設(shè)定頻率,否則就可能不穩(wěn)定,甚至處于惰態(tài)。
4.電機(jī)如果未固定好,造成強(qiáng)烈共振,也會(huì)導(dǎo)致步進(jìn)電機(jī)失步。
5.應(yīng)了解步進(jìn)電機(jī)的固有弱點(diǎn):輸入脈沖頻率過(guò)高,易導(dǎo)致丟步;輸入脈沖頻率過(guò)低,易出現(xiàn)共振;轉(zhuǎn)速偏高時(shí)扭矩降低明顯。
6.應(yīng)了解最新型步進(jìn)電機(jī)的性能,必要時(shí)選用采用了最新控制技術(shù)的高級(jí)步進(jìn)電機(jī)系統(tǒng),高級(jí)系統(tǒng)既可以使步進(jìn)電機(jī)在高速狀態(tài)下減少共振,還能運(yùn)用減少步進(jìn)電機(jī)反電動(dòng)勢(shì)的技術(shù),增加電機(jī)在高速狀態(tài)下的扭矩。
步進(jìn)電機(jī)選擇減速機(jī)誤區(qū):
1.不是減速比越大,輸出力矩越大;
減速箱額定負(fù)載(或者額定力矩)就是減速箱的最終輸出力矩,其實(shí)額定力矩是指減速箱能承受的力矩。
2.減速比越大輸出力矩越大;
如果電機(jī)理論上可以輸出50N.m力矩,有些實(shí)際超過(guò)12N.m減速箱就會(huì)損壞。
3.減速箱速比越大輸出精度越高;
提高速比的確可以細(xì)分輸出角度,但是回差(反向間隙)限制了精度。
4.金屬齒輪就是好減速箱;
粉末冶金的也是金屬齒輪,但是一致性較差,而塑鋼齒輪確可以降低噪音,減速步進(jìn)電機(jī)的噪音主要來(lái)自減速箱。其實(shí)步進(jìn)電機(jī)的低速抖動(dòng)也會(huì)導(dǎo)致噪音,使用中力矩不夠,就要換更高速比的減速機(jī)。除了要關(guān)注減速箱的額定力矩,還要注意步進(jìn)電機(jī)的矩頻特。
療胰島素注射筆驅(qū)動(dòng)系統(tǒng)應(yīng)用")